Hello there, I’m Jacky! 👋
I’m a 4th-year undergraduate student at the University of Toronto studying Robotics🤖 and AI. I’m expected to graduate in May 2025 🎓.
My interests lie in Robotics and Software, with hands-on experience in developing and optimizing robotic systems 🛠. I’ve worked on projects involving SLAM algorithms, ROS2, sensor integration, and robotic control systems. My focus is on real-time performance optimization and algorithm development to ensure efficient, autonomous operation 🚗.
I have also gained valuable experience during my internship at AMD, where I contributed to hardware verification and developed solutions in Python, Perl, and Tcl for system integration 💻.
Currently, I’m exploring career opportunities in both software and hardware roles, with a strong interest in robotics, AI, and embedded systems 🌐.
Education 🎓
 University of Toronto, 2020–2025
University of Toronto, 2020–2025
Bachelor of Applied Science (BASc) in Engineering Science, Focus on Robotics and AI
Expected Graduation: May 2025
Projects 💡
Undergrad Thesis: Haptic Force Feedback for dVRK Surgery Tool 🏥💉
Experimented with various distance-based haptic feedback to prevent tool collision with surrounding organs and improve accuracy on line trace and suturing tasks.
Thesis Report
Autonomous Drone Project 🚁
Performed Waypoint navigation, hovering, and SLAM using Intel RealSense T265 Tracking Camera, Px4 Orange Cube, and Nvidia Jetson Nano.

Kuka Path Planning and Obstacle Avoidance 🤖
Programmed a 6-axis robot in performing path-following tasks with obstacle avoidance. Tasks included picking up and placing items by coordinate.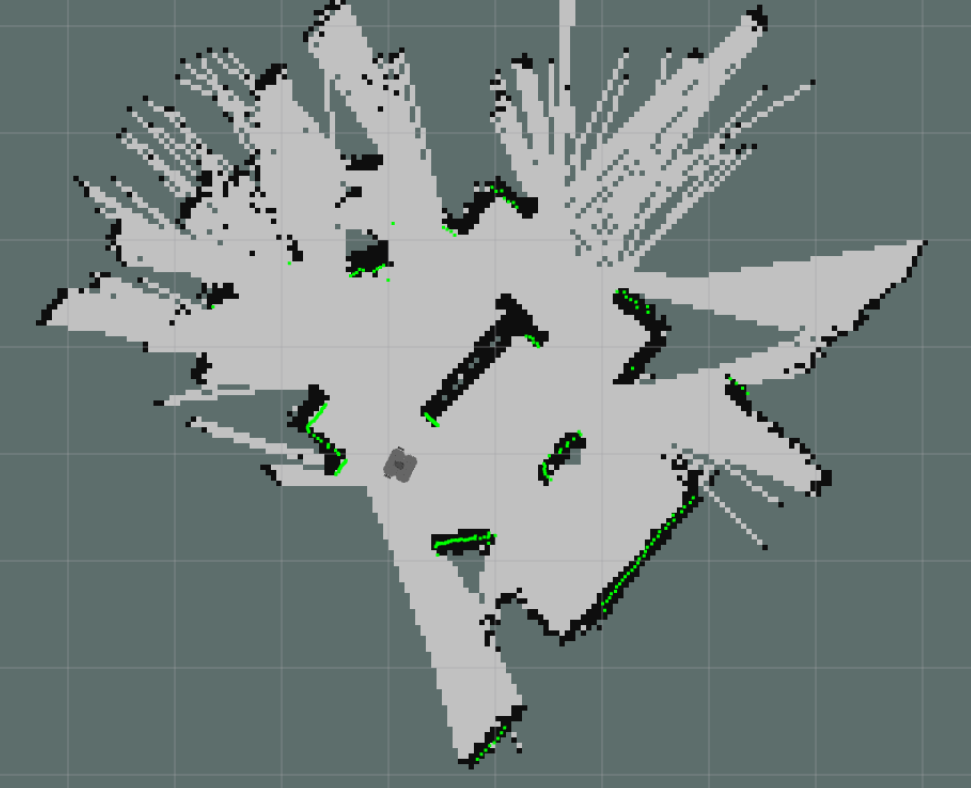
Turtlebot 🐢
Performed Wheel Odometry and Grid-based Mapping as well as Lidar Mapping and Localization. The image shows a mapped real-life obstacle environment.Thanks, more to be updated soon! 🚀